I am a Graduate Researcher at the Robotics Research Center (RRC), IIIT Hyderabad, advised by Prof. Madhava Krishna where I conduct research on geometric foundation models, open-vocabulary 3D scene understanding, and topological robot navigation.
My research interests lie at the intersection of 3D/4D computer vision and robot learning. I am particularly keen on devising granular, hierarchy-aware representations that enable joint optimization for perception and action.
News
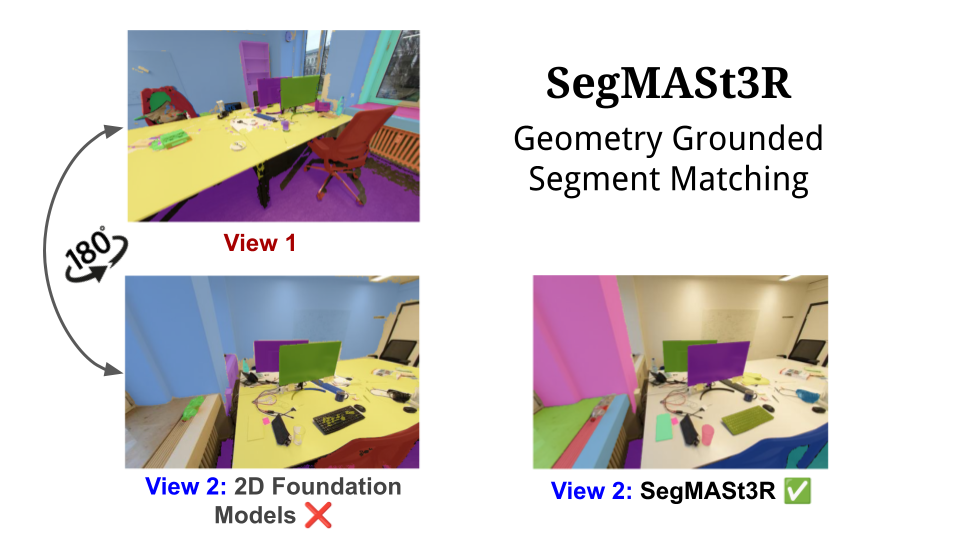
- Sep 2025 🌟 SegMASt3R accepted as a Spotlight at NeurIPS 2025! 🌴 See you in San Diego!
- Oct 2024 🎤 Presented QueSTMaps at IROS 2024 in Abu Dhabi.